ソリトンシステムズと国立大学法人東海国立大学機構 名古屋大学未来社会創造機構、および名古屋大学発ベンチャーのエクセイドは、自動運転では対処が難しい走行状況を遠隔地から簡易な操作で支援できる新しい遠隔型自動運転システム「遠隔アシスト」を共同開発しました。この仕組みにより、自動運転車が生活道路などで路上駐車を迂回するような場面に遭遇した際、走行の継続が容易になります。
この遠隔アシストを活用した日本初の公道実証実験は、愛知県春日井市高蔵寺ニュータウンの公道で、2024年12月17日から開始します。住宅街の自動運転サービス高度化をテーマとした研究開発「知の拠点あいち重点研究プロジェクトD9」の一環で行われ、名古屋大学が開発し、エクセイドが提供している自動運転ソフトウェアパッケージ「ADENU」(Autonomous Drive Enabler by Nagoya University)を搭載した電動カートを、豊田市内に設置した遠隔センターから支援します。
現在、多くの場所でドライバーの無人化を目指した自動運転の公道実証が進められていますが、緊急時や自動運転システムでは対応しにくい場面(自動運転レベル2)に備えて、人が運転席で待機する形がほとんどです。また、自動運転システムでは対応困難な走行ユースケースに備えて、遠隔監視者が車両を制御する遠隔型自動運転システムを用いる場合もありますが、従来の遠隔運転方式では、現場の状況に応じた操作に時間がかかるなど即応性に課題がありました。
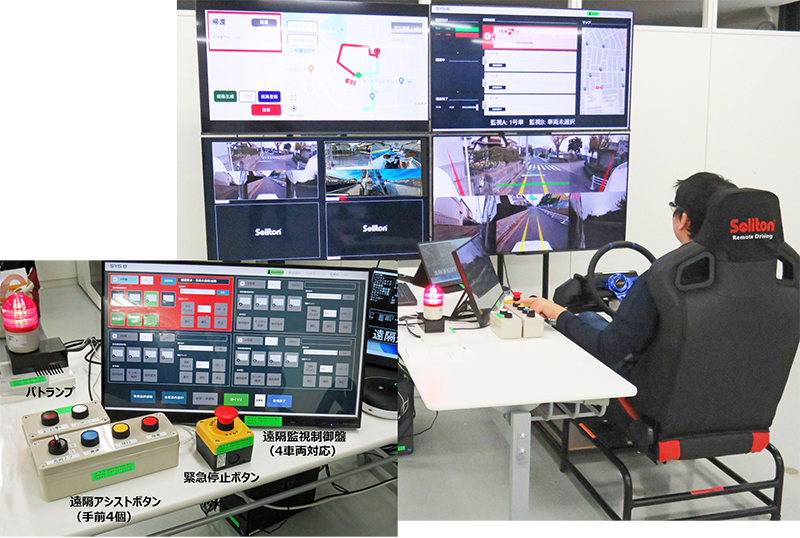
そこで新たに開発された遠隔アシストは、自動運転システムと遠隔側の情報連携を強化し、自動運転車からの支援要請があった際、遠隔監視・操作者が映像などをもとに即座に対応を判断し、ボタン操作で指示を送信するという仕組みです。自動運転車は車載センサーと送信されたアシスト情報を合わせて活用し、最終的に自律走行の判断を行います。これにより、同乗ドライバーの操作が不要になる場面が増え、車両に人員を派遣しなくても走行を継続できるため、事業性の向上が期待されます。
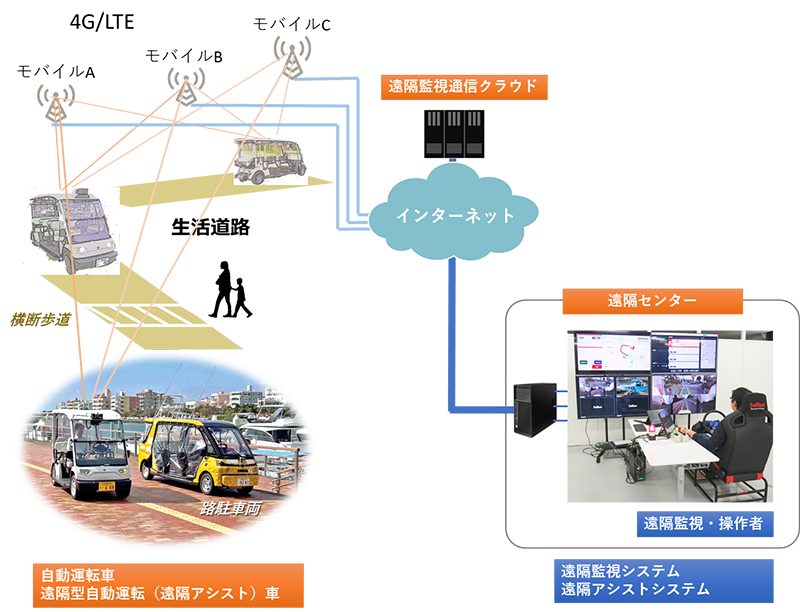
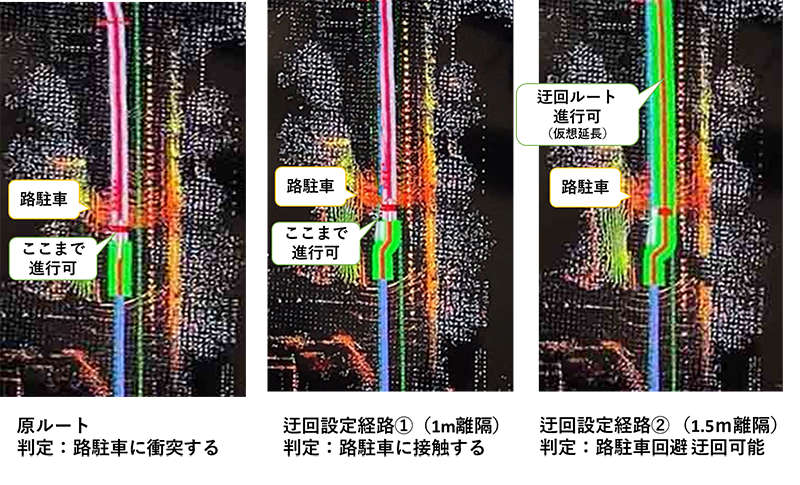
この遠隔アシストを導入した遠隔型自動運転システムは、従来の全走行ユースケース対応型の遠隔運転をベースに一部追加する形で構成されています。今後、ソリトンとエクセイドは全国の自動運転運営事業者に対して、遠隔アシストを含む遠隔型自動運転システムの提供を進めていく予定です。今回の実証実験では、豊田市内の遠隔センターから愛知県春日井市高蔵寺ニュータウン内を走る電動カートを遠隔アシストで支援し、実際に路上駐車の迂回など、自動運転システム単独では対処しづらいケースでも走行継続が可能となることを検証します。
レポート/DXマガジン編集部折川